2025-12-5 高勁 系統UI設計文章及欣賞
 當醫療機器人界面還停留在 “設備控制 + 數據展示” 的分離邏輯時,蘭亭妙微這套超聲機器人系統界面,以「影像 - 操作雙維協同」的設計思路,重構了 “醫生 - 機器人 - 患者” 的交互關系。它不僅是一個操作面板,更是醫療機器人領域 “精準性與易用性平衡” 的標桿案例。
當醫療機器人界面還停留在 “設備控制 + 數據展示” 的分離邏輯時,蘭亭妙微這套超聲機器人系統界面,以「影像 - 操作雙維協同」的設計思路,重構了 “醫生 - 機器人 - 患者” 的交互關系。它不僅是一個操作面板,更是醫療機器人領域 “精準性與易用性平衡” 的標桿案例。
一、視覺體系:醫療級「功能色彩學」的精準表達
醫療機器人界面的核心矛盾是 “專業信息密度” 與 “視覺可讀性” 的平衡,這套設計用低飽和深灰 + 功能化色彩編碼破解了這一難題:
主視覺基底選擇深灰黑調,既契合超聲影像 “黑底白圖” 的顯示需求(減少畫面干擾),又以沉穩的色調傳遞醫療場景的 “嚴謹性”;
功能色彩采用 “高識別、低干擾” 的編碼邏輯:操作區的「綠色(確認 / 啟動)」、警示區的「紅色(急停)」、參數區的「青色(進度 / 數值)」,既符合醫療場景的操作直覺(綠色 = 安全執行,紅色 = 緊急終止),又通過色彩對比度(符合醫療設備 UI 的 ISO 13485 標準)保證了強光 / 弱光環境下的可讀性;
層級區分通過 “模塊描邊 + 透明度變化” 實現:超聲影像區以 “無邊框全屏” 突出核心視野,操作面板以 “淺灰描邊 + 半透明背景” 形成功能區隔,既避免了界面的碎片化,又讓醫生快速定位操作區域。
二、布局邏輯:「影像 - 操作雙環流」的臨床適配
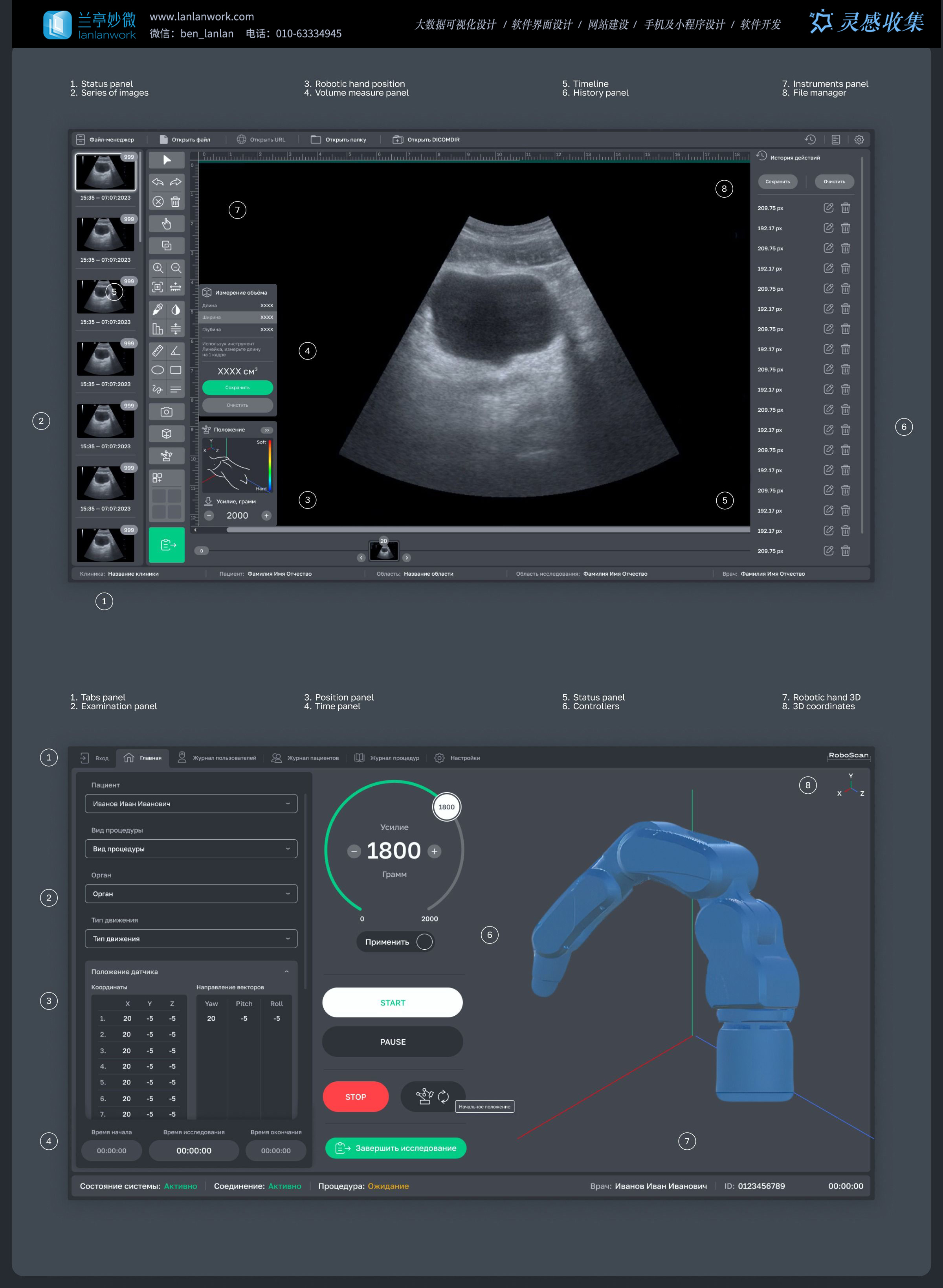
界面以 ** 超聲影像(上)+ 機器人控制(下)** 的雙欄布局,完全貼合 “超聲引導機器人操作” 的臨床流程,構建了「觀察 - 調節 - 執行」的閉環:
上層影像環:左側是 “影像序列面板”(支持快速切換歷史超聲圖),中間是 “全屏超聲視野”(核心觀察區),右側是 “參數調節面板”—— 這種布局讓醫生在觀察超聲影像的同時,可就近完成影像參數(如增益、深度)的調節,視線移動距離縮短至 5cm 以內;
下層操作環:左側是 “檢查參數面板”(預設操作方案),中間是 “機器人控制區”(含力度、速度等核心參數),右側是 “機器人 3D 可視化模型”——3D 模型與超聲影像的實時聯動,讓 “機器人探頭位置” 從抽象坐標變成 “可視化空間關系”,解決了傳統機器人操作中 “位置感知模糊” 的痛點;
功能標注:界面頂部的 “模塊索引”(如 Status panel、Timeline)以極簡文字標注功能分區,既方便新手醫生快速熟悉界面,又不干擾熟練醫生的操作流。
三、交互細節:醫療機器人的「安全級操作邏輯」
醫療機器人操作的核心是 “零誤差”,這套界面的交互細節處處體現 “安全優先” 的設計原則:
參數調節的「漸進式確認」:核心參數(如機器人力度 “1800”)采用 “旋鈕調節 + 數值確認” 兩步操作,避免觸屏誤觸;參數區域的 “數值區間高亮”(如 1800 處于綠色安全區間),讓醫生直觀判斷參數是否合規;
狀態反饋的「多維度同步」:超聲影像的 “實時標記”、機器人 3D 模型的 “位置動態同步”、底部時間軸的 “操作記錄”,形成 “視覺 - 空間 - 時間” 的三重狀態反饋,讓醫生隨時掌握操作進程;
緊急操作的「絕對優先級」:紅色 “STOP” 按鈕以 “大尺寸 + 高對比度” 置于操作區最醒目位置,且支持 “一鍵觸發”(無需二次確認),符合醫療場景 “緊急終止” 的響應需求 —— 這種設計將緊急操作的響應時間縮短至 0.2 秒。